|
|
Arquitectura de Von Neumann
|
La arquitectura Von Neumann, también conocida como modelo de Von Neumann o arquitectura Princeton, es una
arquitectura de computadoras basada en la descrita en 1945 por el matemático y físico
John Von Neumann. Este describe una arquitectura de diseño para un computador
digital electrónico con partes que constan de:
El concepto ha evolucionado para convertirse en un
computador de programa almacenado en el cual no pueden darse simultáneamente una búsqueda de instrucciones y una operación de
datos, ya que comparten un
bus en común. Esto se
conoce como el
cuello de botella Von Neumann, y muchas veces limita el rendimiento del sistema.
|
|
Arquitectura Von Neumann
|
El diseño de una arquitectura Von Neumann es más simple que la
arquitectura Harvard más moderna, que también es un sistema de programa almacenado, pero tiene un conjunto dedicado de
direcciones y buses de datos para leer datos desde memoria y escribir datos en la misma, y otro conjunto de direcciones y buses de datos para ir a buscar instrucciones.

|
|
Arquitectura Harvard
|
Un ordenador digital de programa almacenado es aquel que mantiene sus
instrucciones de programa, así como sus datos, en una
memoria de acceso aleatorio (RAM) de
lectura-escritura. Las computadoras de programa almacenado representaron un avance sobre los ordenadores controlados por programas de
la década de 1940, como la
Colossus y la
ENIAC, que se programaron mediante el establecimiento de conmutadores y la inserción de
cables de interconexión para enrutar datos y para controlar señales entre varias unidades funcionales. En la gran mayoría de las computadoras modernas, se utiliza la misma memoria
tanto para datos como para instrucciones de programa, y la distinción entre Von Neumann vs. Harvard se aplica a la arquitectura de memoria
caché, pero no a la memoria principal.
Estructura clásica de las máquinas Von Neumann
Una máquina Von Neumann, al igual que prácticamente todos los computadores modernos de uso general, consta de cuatro componentes principales:
- Dispositivo de operación (DO), que ejecuta instrucciones de un conjunto especificado, llamado sistema (conjunto) de
instrucciones, sobre porciones de información almacenada, separada de la memoria del dispositivo operativo (aunque en la arquitectura moderna el dispositivo operativo consume más
memoria -generalmente del banco de registros-), en la que
los operandos son almacenados directamente en el proceso de cálculo, en un tiempo relativamente corto
- Unidad de control (UC), que organiza la implementación consistente de algoritmos de decodificación de instrucciones que provienen
de la memoria del dispositivo, responde a situaciones de emergencia y realiza funciones de dirección general de todos los nodos de computación. Por lo general, el DO y la UC
conforman una estructura llamada CPU. Cabe
señalar que el requisito es consistente, el orden de la memoria (el orden del cambio de dirección en el contador de programa) es fundamental a la hora de la ejecución de la
instrucción. Por lo general, la arquitectura que no se adhiere a este principio no se considera Von Neumann
- Memoria del dispositivo — un conjunto de celdas con identificadores únicos (direcciones), que contienen instrucciones
y datos.
- Dispositivo de E/S (DES), que permite la comunicación con el mundo exterior de los computadores, son otros dispositivos que
reciben los resultados y que le transmiten la información al computador para su procesamiento.

|
|
Evolución del bus simple del sistema
|
Evolución
Evolución de la arquitectura del
bus simple del sistema
A lo largo de las décadas de los años 1960 y 1970, las computadoras se hicieron, en general, tanto más pequeñas como rápidas, lo que llevó a algunas evoluciones en su arquitectura.
Por ejemplo, el
mapeado en memoria de E/S permitió que
los dispositivos de entrada y salida fueran tratados de la misma como la memoria. Un único
bus de sistema podría ser utilizado para proporcionar un sistema modular con un menor coste. A veces esto se denomina
"racionalización" de la arquitectura.En las décadas siguientes, los
microcontroladores sencillos permitirían algunas veces omitir características del modelo a menor costo y tamaño. Las
computadoras más grandes añadían características para un mayor rendimiento.
INTRODUCCIÓN:
La mayoría de los sistemas informáticos actuales siguen al pie de la letra la arquitectura propuesta por Von Newmann en el diseño del
EDVAC. Esta arquitectura se caracteriza porque el
programa que ejecuta el sistema informático está almacenado internamente (es información) en el propio sistema.
La arquitectura de Von Newmann define los siguientes elementos:
-
Unidad Central de Proceso (CPU
- Central Processing Unit)
- Memoria principal
- Controlador de entrada salida
- Buses del sistema
-
- Bus de datos
- Bus de direcciones
- Bus de control
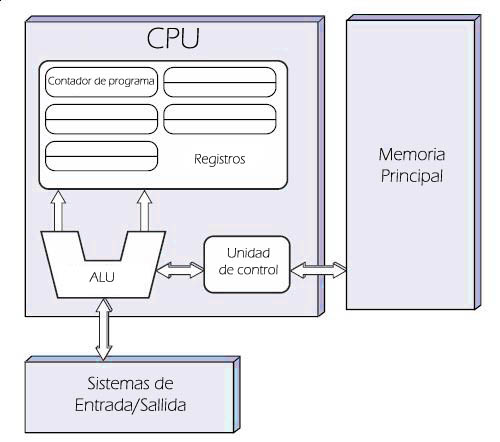
UNIDAD CENTRAL DE PROCESO (CPU)
La CPU es el lugar en el que se procesa la información de acuerdo a las instrucciones del programa. La CPU de un sistema informático repite una serie de pasos en los que
continuamente accede a memoria para leer la próxima instrucción a ejecutar, realiza lo que ordena la instrucción y vuelta a empezar.
Cuando la CPU está implementada en un único
circuito integrado se llama
microprocesador (
µP).
En una CPU podemos distinguir:
-
Unidad aritmético lógica (ALU Arithmetic and logical unit)
-
Se encarga de realizar las operaciones aritméticas (sumas, restas, multiplicaciones, etc..) y lógicas (AND, OR, rotaciones, desplazamientos, etc...) con los datos. Normalmente
los datos con los que opera, así como los resultados de la operación se encuentran en registros de la CPU.
Las operaciones que es capaz de realizar están definidas por el juego de instrucciones de la CPU. Es posible encontrar ALUs con capacidades orientadas hacia la operación con
valores enteros, coma flotante o números imaginarios (por ejemplo en las DSP.)
-
Banco de registros
-
Proporciona un espacio de almacenamiento para los datos con los que trabaja la CPU. Los registros se deben cargar con información que proviene de la memoria principal antes de
comenzar a operar, cuando se necesita dejar espacio libre en el banco de registros para operar con nuevos datos su valor debe escribirse en la memoria principal.
Operar con datos en el banco de registros es mucho más rápido que operar con datos que se encuentran en la memoria principal, por eso, cuanto mayor sea el banco de registros
se requerirán menos trasvases con la memoria principal y la tarea se realizará antes.
Es posible que no todos los registros tengan las mismas características. Normalmente se distingue entre:
-
Registros de datos: Guardan la información con la que se trabaja.
-
Registros de direcciones: Guardan direcciones de memoria (en las que puede haber datos).
-
Registros de control: Controlan el estado de la CPU (flags: zero, overflow, underflow, positivo/negativo...)
-
Unidad de control
-
Se encarga de leer las instrucciones máquina almacenadas en la memoria principal y de generar las señales
de control necesarias para controlar y coordinar el resto de las unidades funcionales de un ordenador, con el fin de ejecutar las
instrucciones leídas.
Partes fundamentales:
-
Contador de programa: Registro que apunta a la dirección de memoria de la próxima instrucción a ejecutar. Se incrementa
automáticamente después de ejecutar cada instrucción.
-
Registro de instrucción: Guarda la instrucción que se está ejecutando.
-
Decodificador: Interpreta la instrucción a ejecutar.
-
Reloj: Genera una señal de sincronía.
-
Secuenciador: Activa en el orden adecuado las diferentes unidades funcionales para ejecutar la instrucción.
Los dos tipos más frecuentes de unidades de control son:
-
Cableada: La lógica de las operaciones está implementada mediante hardware.
-
Microprogramada: Se trata de una pequeña CPU en miniatura que puede programarse para realizar diferentes tareas. Son más
flexibles pero más lentas.
-
-
Buses
-
Transportan la información entre los diferentes elementos de la CPU. Se distingue entre el bus de datos (que transporta la información que se está procesando) y el bus de
control (que proporciona toda la señalización necesaria para realizar el trabajo de forma ordenada).
MEMORIA PRINCIPAL
La memoria principal tiene por objeto guardar información que es accesible a la CPU. La CPU puede leer y/o escribir datos en las diferentes posiciones de memoria que componen la
memoria principal.
La memoria principal tiene menor capacidad que la memoria secundaria (que virtualmente es ilimitada), pero es mucho más rápida. Actualmente la memoria principal se implementa
mediante circuitos integrados. La memoria principal de los sistemas informáticos suele estar formada por dos áreas diferenciadas:
- Memoria RAM (Random Access Memory): Memoria de acceso aleatorio (no
tiene porqué ser utilizada de manera secuencial) que permite tanto la lectura como la escritura. Habitualmente en los sistemas informáticos se trata de un medio de almacenamiento
volátil, de manera que se pierde su contenido al cesar la alimentación.
- Memoria ROM (Read Only Memory): Memoria de acceso aleatorio que
sólo permite la lectura de los datos que almacena. Se trata de un medio de almacenamiento persistente, pues no pierde su contenido cuando cesa la alimentación.
CONTROLADOR DE ENTRADA/SALIDA (I/O)
En la medida en la que el sistema informático precisa comunicarse con el mundo exterior (utilizando diferentes periféricos), es necesario un elemento que controle el flujo de
información que entra y/o sale del sistema informático.
Los periféricos del sistema informático se pueden clasificar en:
-
Periféricos de entrada: Si sirven para introducir información en el sistema informático (ej. teclado, ratón...)
-
Periféricos de salida: Si representan información que sale del sistema informático (ej. monitor, impresora...)
Las tres técnicas más extendidas de gestión de I/O son:
-
Polling o espera activa: La CPU se encarga de la transferencia de información consultando continuamente el estado del
dispositivo periférico. Simple e ineficiente.
- Uso de interrupciones: La CPU se encarga de la transferencia de información pero el dispositivo periférico le
notifica los cambios de estado mediante una interrupción.
-
DMA (Direct Memory Access): El controlodador DMA se encarga de toda la transferencia de información (puede ser un bloque, y puede requerir de
conversión). Al finalizar el controlador DMA utiliza una interrupción para notificarlo a la CPU. Con esta técnica, la CPU programa al controlador DMA para realizar el trabajo
y queda libre (para realizar otras tareas). Es la técnica más eficiente.
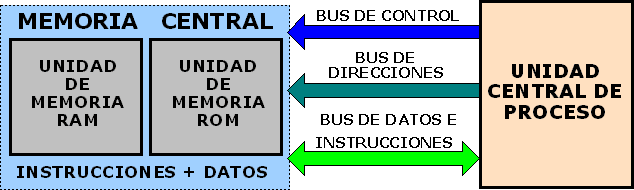
BUSES DEL SISTEMA
Los buses son las vías de comunicación que permiten mover la información entre los distintos elementos de la arquitectura Von Neumann.
Desde el punto de vista electrónico un bus es una serie de pistas que transportan información entre diferentes elementos. El número de líneas que tiene el bus determina el número
de bits que se pueden transportar en paralelo. Los buses suelen ser elementos síncronos que funcionan gobernados por un reloj. Normalmente en cada ciclo de reloj se transporta un
dato (de 8, 16 o 32 bits según la anchura del bus), también existen buses que realizan dos operaciones en cada ciclo de reloj (utilizan tanto el flanco de bajada como el flanco de
subida).
Ejemplo:
El bus PCI cuenta con la siguiente especificación:
- Ancho del bus: 32 bits
- Reloj: 33 Mhz
Fácilmente podemos calcular la cantidad máxima de información que puede transportar en un segundo. Simplemente necesitamos multiplicar la información que mueve en cada ciclo (32
bits = 4 Bytes) por el número de ciclos que tienen lugar en un segundo (33*106).
Información por segundo: 4 Bytes * 33*106 = 132000000Bytes/s = 125.88MB/s
Si el bus fuese capaz de utilizar tanto el flanco de subida como el de bajada para transmitir información, se doblaría la capacidad útil.
-
Bus de datos:
-
Como su nombre indica transporta datos. Estos datos pueden ser la información que se está procesando o las instrucciones del programa que se ejecuta. Hay que recordar que en
la arquitectura Von Neumann el programa está guardado en el interior del sistema informático codificado como información.
El ancho en bits del bus de datos define el tamaño de la palabra del sistema informático, habitualmente es 8bits, 16bits,
32bits o 64bits.
-
Bus de direcciones:
-
El bus de direcciones se utiliza para indicar el origen y/o el destino de los datos. En el bus de direcciones se indica la posición
de memoria a la que se está accediendo en cada momento. Puede tratarse de una dirección de la memoria principal o puede tratarse de una dirección de memoria en
la que está mapeado un periférico.
El ancho en bits del bus de direcciones determina el tamaño del espacio de memoria direccionable.
-
Bus de control:
-
El bus de control proporciona señales para coordinar las diferentes tareas que se realizan en el sistema informático.
Algunas de las señales que podemos encontrar:
-
CLK: Frecuencia de reloj
-
CS (Chip select): Activa el chip a utilizar
-
READY: Está disponible el dispositivo ?
-
R/W: Se trata de una operación de lectura o escritura ?
 FRANOLEAJE
FRANOLEAJE











{kind=link}